ロボット導入検討例
パラレルリンクロボットの導入検討例
パラレルリンクロボットってどんなもの?
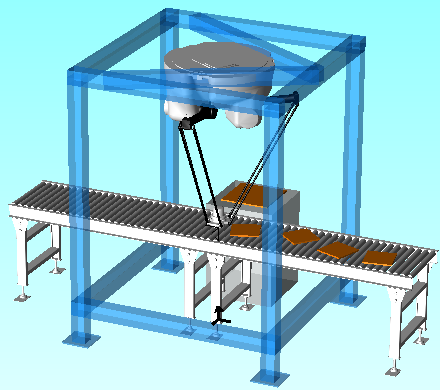
<パラレルリンクロボット導入イメージ図>
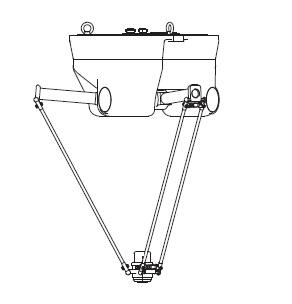
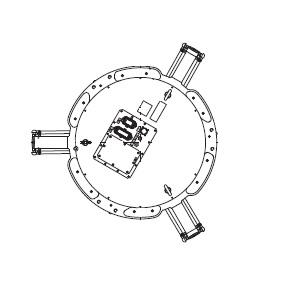
<パラレルリンクロボットの特長>
並列に配列されている複数の機構の出力を1点に集中させることができるため高出力を生み出せます。
この構造により安川ピッキングロボットMOTOMAN MPPシリーズでは、アデプトパターン(※1)25-305-25mm動作時に3kg可搬では150CPM(※2)、1kg可搬では230CPMの動作が可能です。
<でも実際の動作だと...>
運びたいワークの重量が大きくなればロボットの動作が遅くなるのは、イメージとしてもわかるのだが...
CPMとは、あくまでその動作パターンで動ける回数(速さ)を示しています。
そのため、実際の動作ではロボットがワークを吸着・破壊(掴む・離す)する時間を考慮しなくてはいけません。
ロボットがハンド(※3)による吸着・破壊(掴む・離す)時間を加えると、ロボットのサイクルタイムはそれだけ遅くなります。
また、ロボットの移動する位置に関してより精度を求めようとすると、ロボットのサイクルタイムは同様に遅くなります。
上記内容等を含めた上で、パラレルリンクロボットを選定する必要があります。
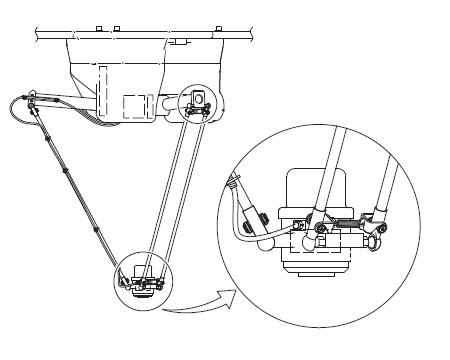
<ちょこっと技術情報 ~ロボットが脱臼!?~>
パラレルリンクロボットが周辺機器と干渉してしまった場合、ロボットと周辺設備が故障してもらっては困る。
干渉時のダメージを最小限にするためにジョイント部が外れる構造になっています。
(※1) 位置決め制限無し、ワークつかみ(吸着)時間を含まないときの下記動作パターン
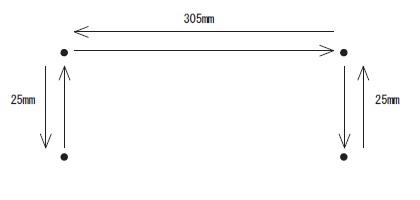
(※2) 1分間に決められた動作を何回行えるかを示したもの(cycle per minute)
(※3) パラレルリンクロボットのハンド部イメージ