自由で柔軟な動きを実現する「垂直多関節ロボット」の仕組み
”垂直多関節”とは?
産業用ロボットの種類は大きく分けて「垂直多関節ロボット」、「水平多関節ロボット」、「パラレルリンクロボット」、「直交ロボット」などがあります。
特に、「垂直多関節ロボット」は人間のような繊細かつ柔軟な動きを実現できることから様々な作業工程を行うことができるマルチな産業用ロボットです。
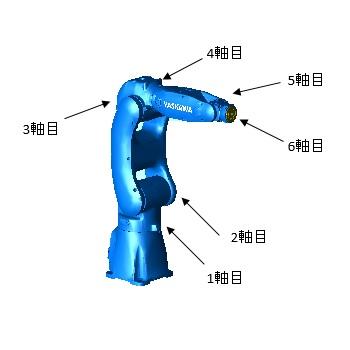
動作方法としては、モータの力で軸や関節と呼ばれる可動部分を動かし、目標の位置や姿勢に移動します。
その軸や関節の部位が基本的に6つあるため「多関節」と呼ばれています。
この多関節の機構があることで、様々な動きを実現しています。
自由度と動きの関係
垂直多関節ロボットが自由度は、一般的に6つで構成されています。
(ロボットの可動部のことを「関節」や「軸」と言いますが、同様に「自由度」とも表します)
なぜ、6自由度が必要なのか
3次元空間で物体の位置と姿勢について座標で表すと、以下の図のようになります。
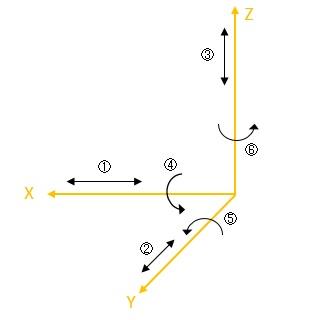
①X軸方向の自由度
②Y軸方向の自由度
③Z軸方向の自由度
④X軸方向の回転自由度
⑤Y軸方向の回転自由度
⑥Z軸方向の回転自由度
座標から分かるように、3次元空間において、最低6自由度を用いれば物体の位置と姿勢を自由に動かすことが可能なのです。
また、場合によっては動作可能な範囲に制限が加わることがありますが、6つの自由度を持つ垂直多関節ロボットは自由な場所に自由な角度で作業を行うことができるのです。
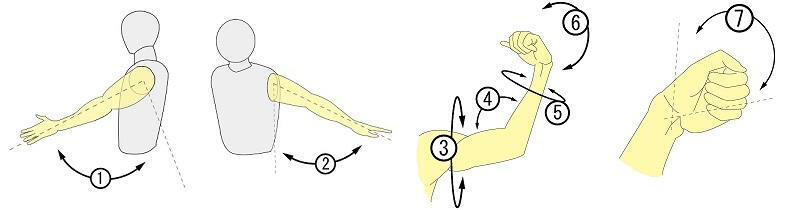
人の腕の自由度
人の腕の動きを自由度で表すと、以下の7つとなります。
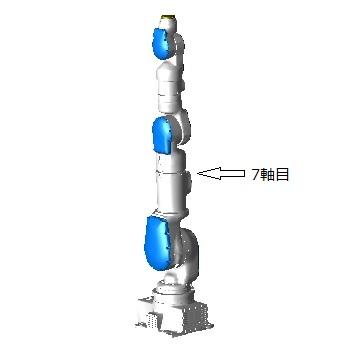
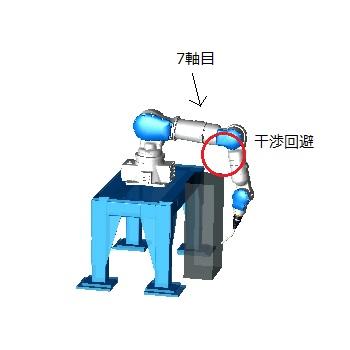
7軸ロボットの特徴
人の腕と同じ動きができるということで、6軸の自由度に肘の角度の自由度を加えた7軸のロボットも用途により活躍しています。
【メリット1】省スペースでの設置が可能
7軸目を使用することで、回り込みなどの柔軟な姿勢を取れるため、機械やワークなどに接近して設置できます。
また複数のロボットを接近して設置できるため、工程間の省スペース化が可能になります。
【メリット2】最適姿勢を保持
周辺の干渉物を回避しながらの動作が6軸の場合と比べ得意となります。
垂直多関節ロボットや7軸ロボット等の詳しい説明や用途について気になるという方は是非お問い合わせ下さい。




